
Giraffe Lamp
Part of a series of exercises, the animation of a fragmented Cube is an introduction to Kinetic Design. It explores basic hinges, arms, strings and leveraging their positions to control the movement.
The Assignment
IND-515-01 Kinetic Design Pratt Institute, Fall 2011
This was a final exercise for the Kinetics Design class that began with the creation of five different movement sketches and then selecting one to continue.
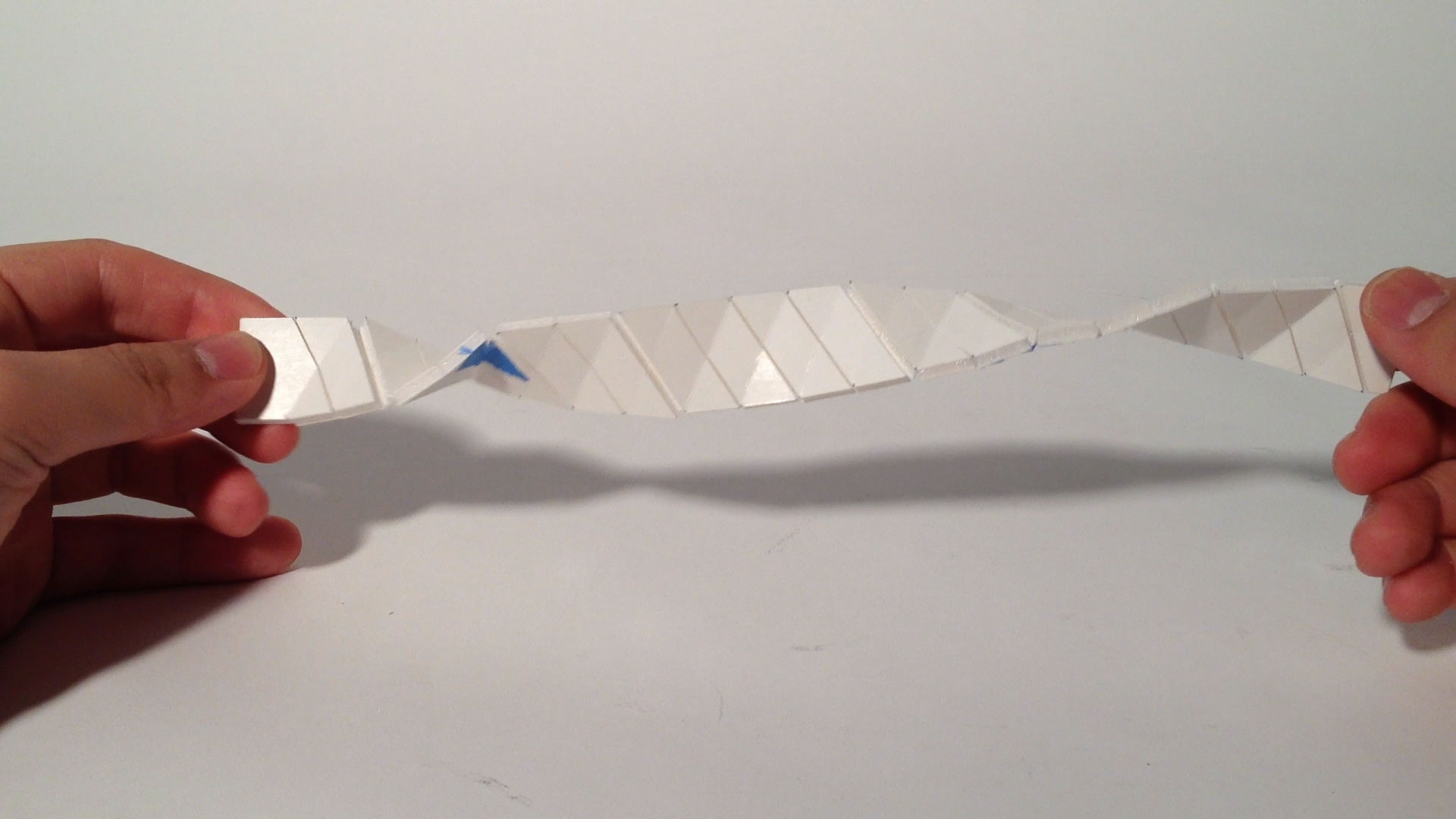
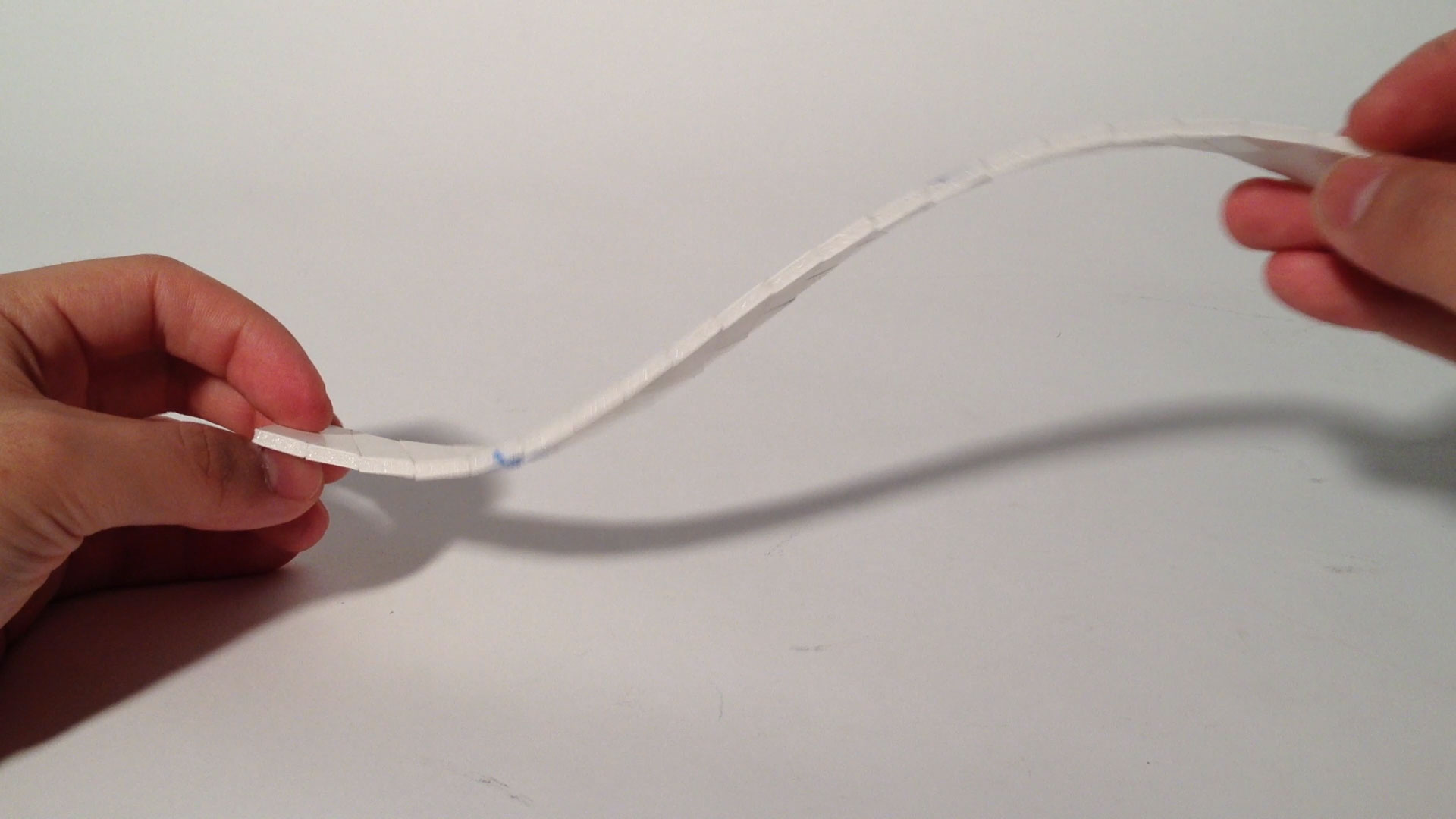
The first four reminded me of robotic parts but the fifth one showed a huge range of motion. Here's a movie of how it moved.
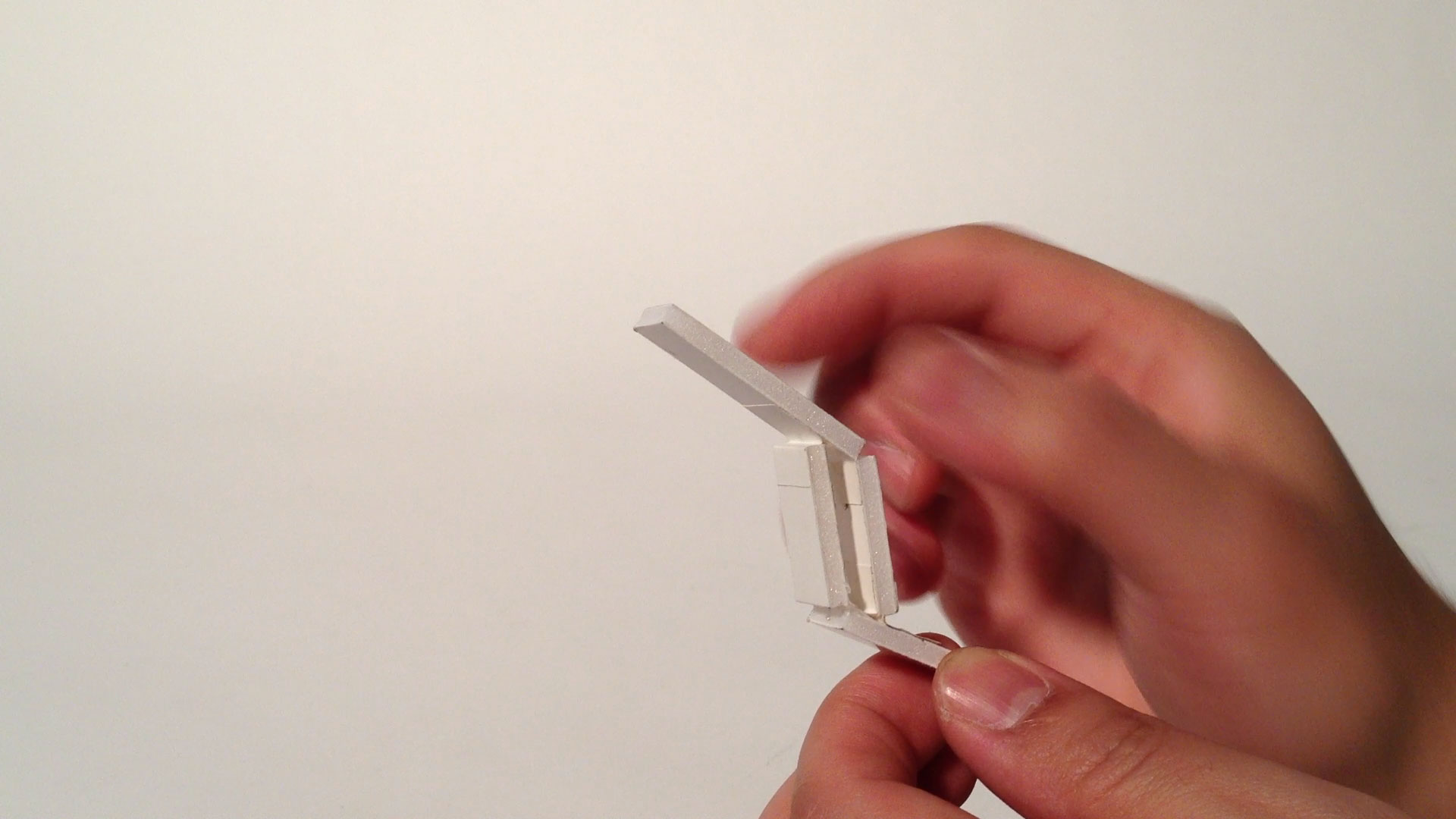
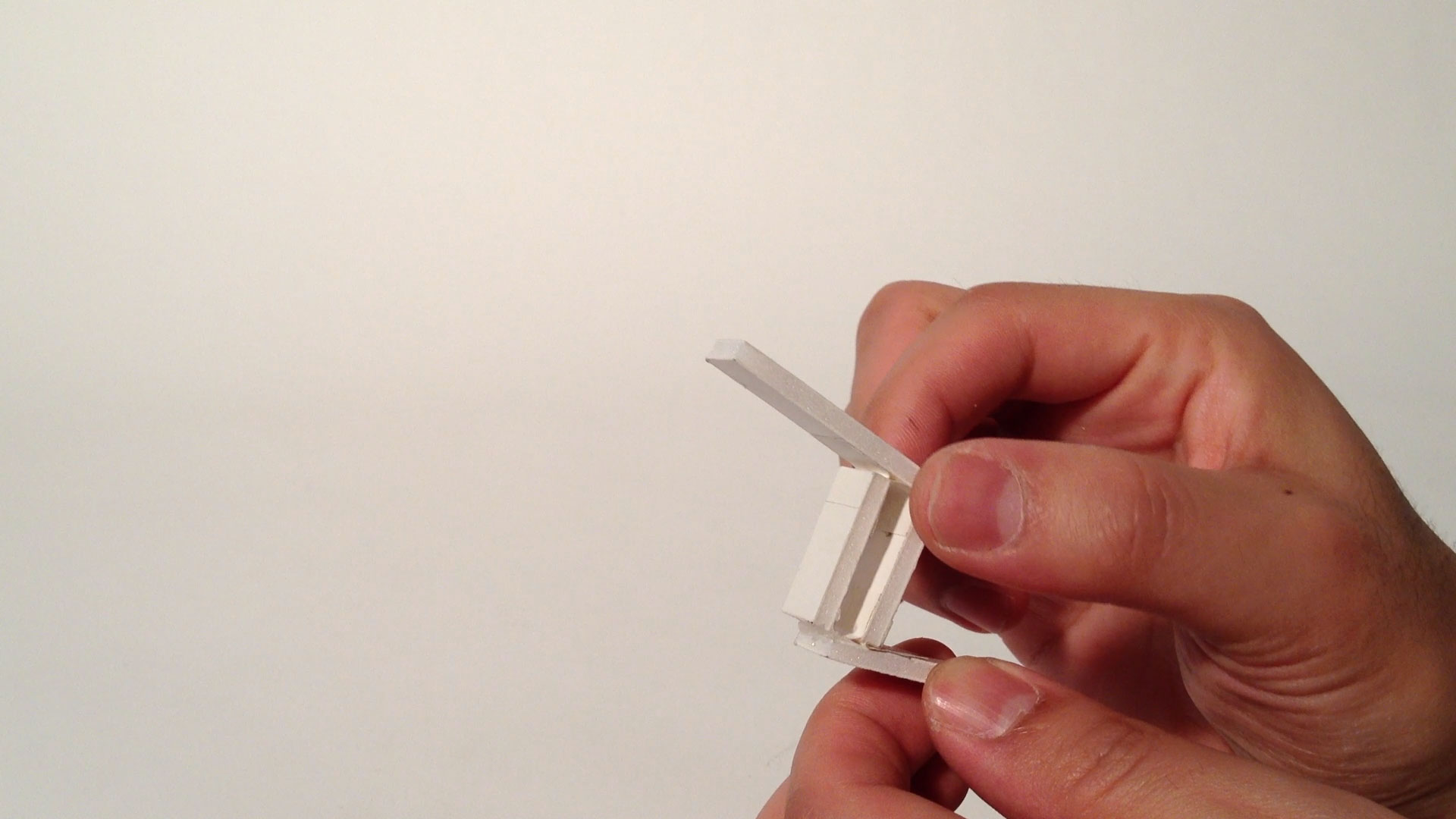
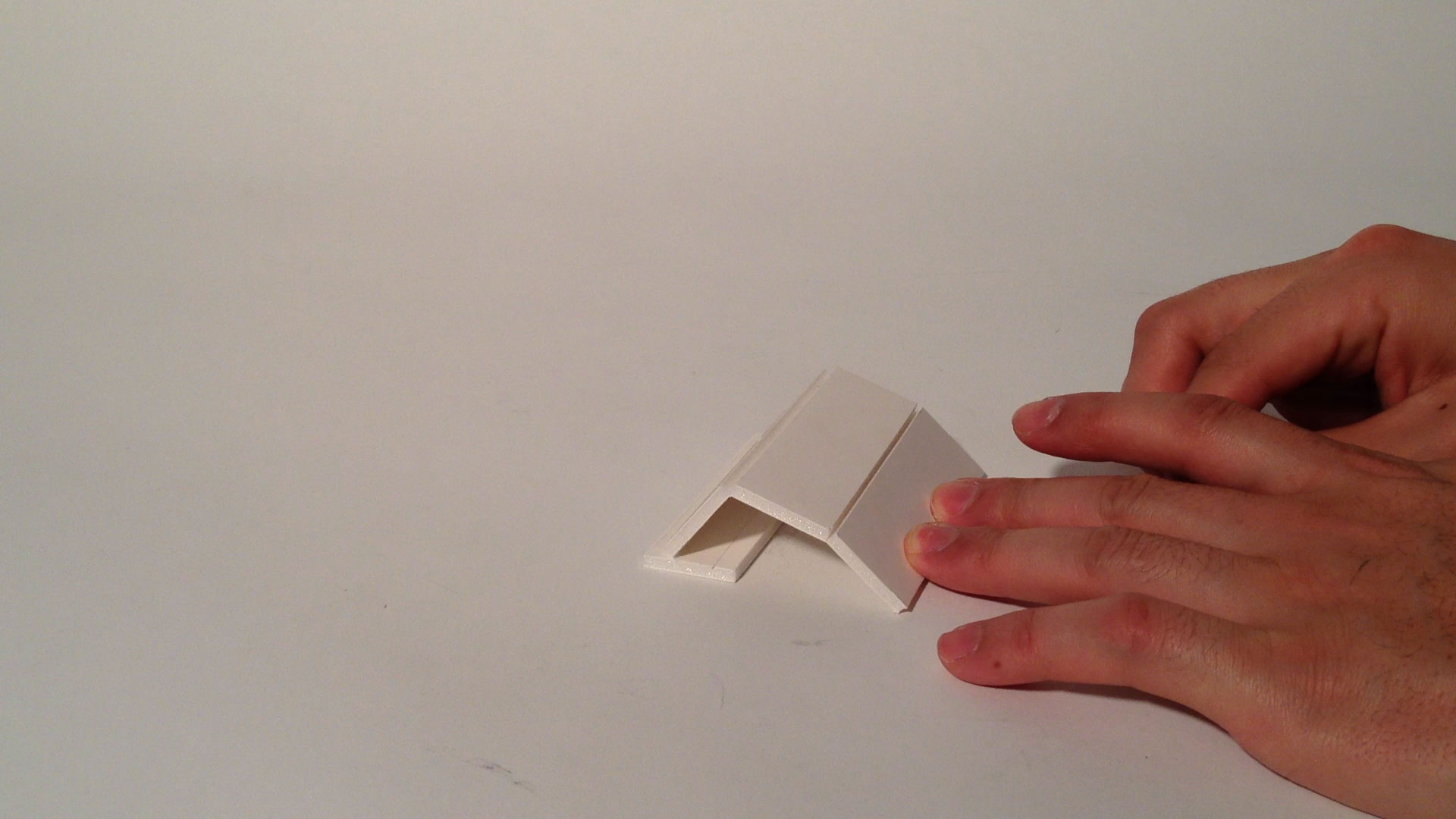
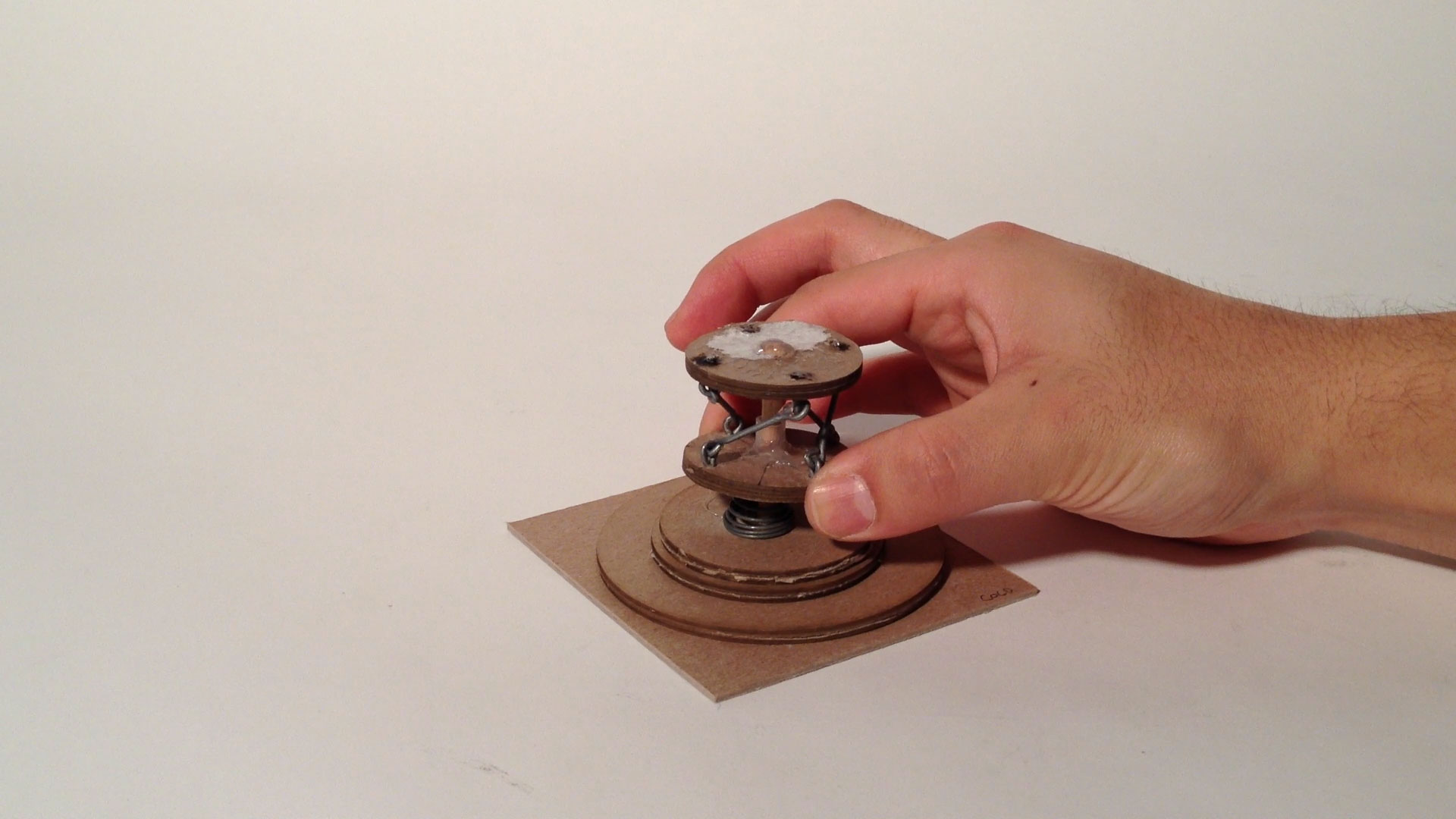
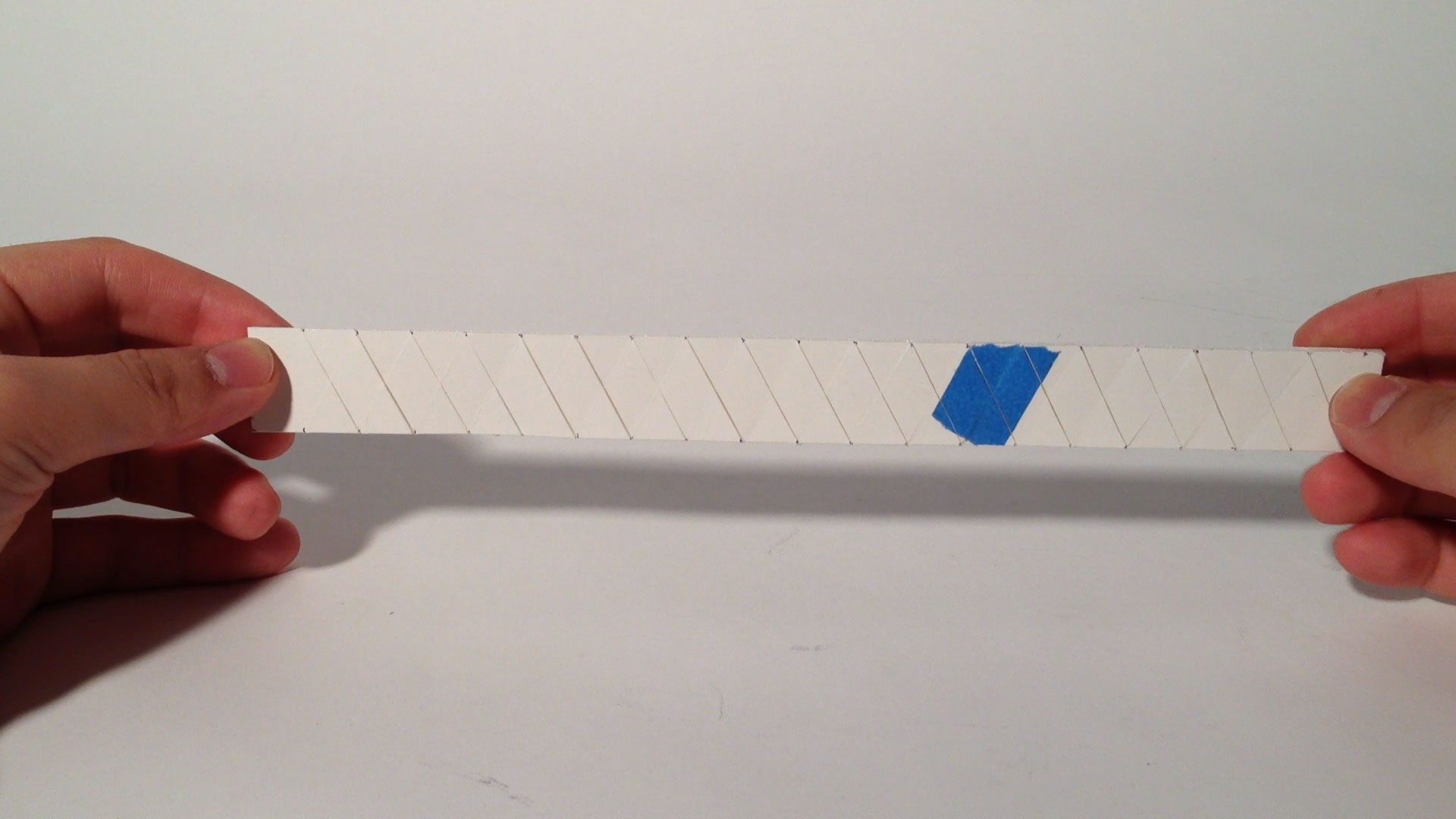
First Sketch Model - It doesn't do much but could be interesting.
First attempt at creating some kind of control
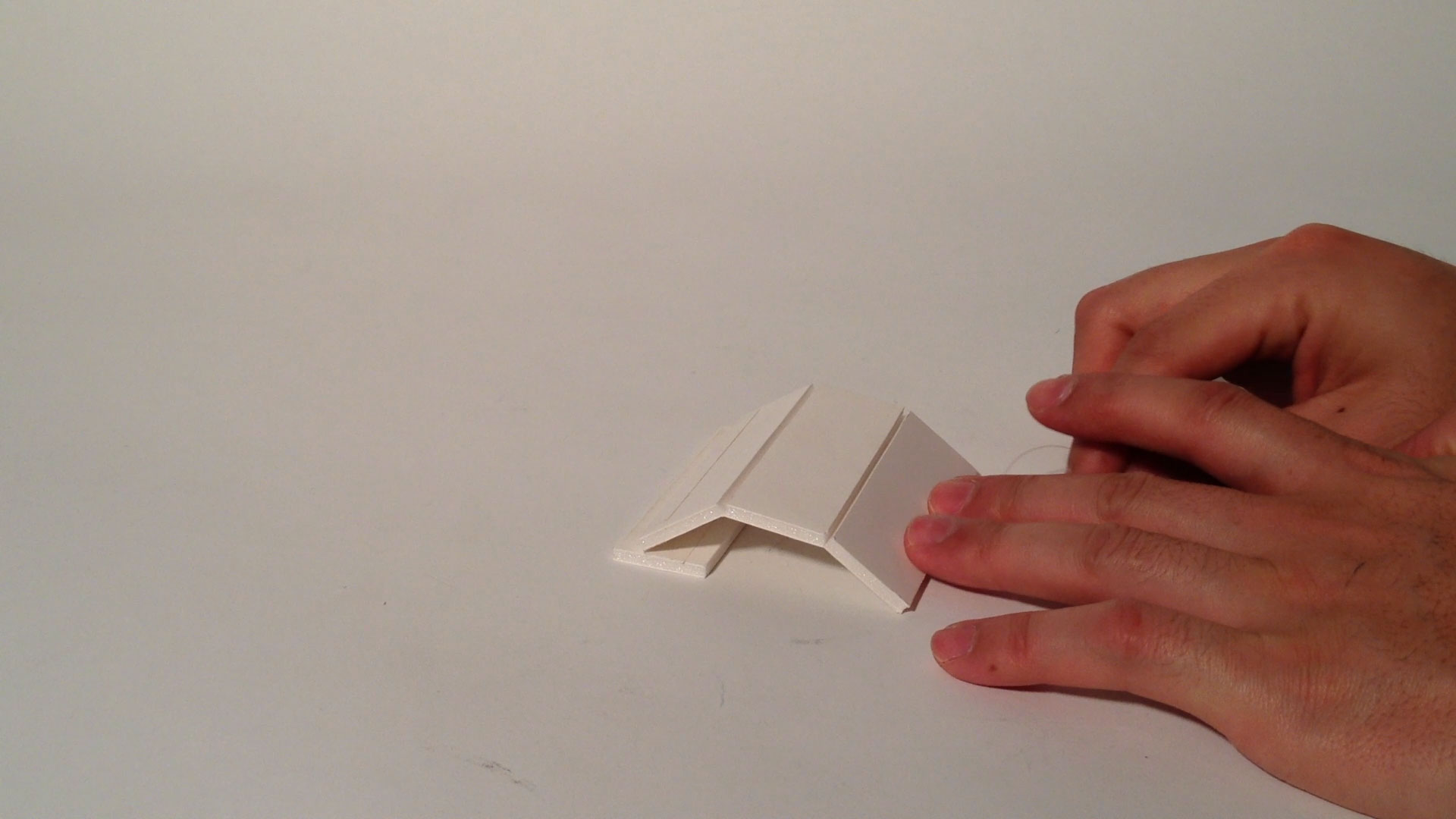
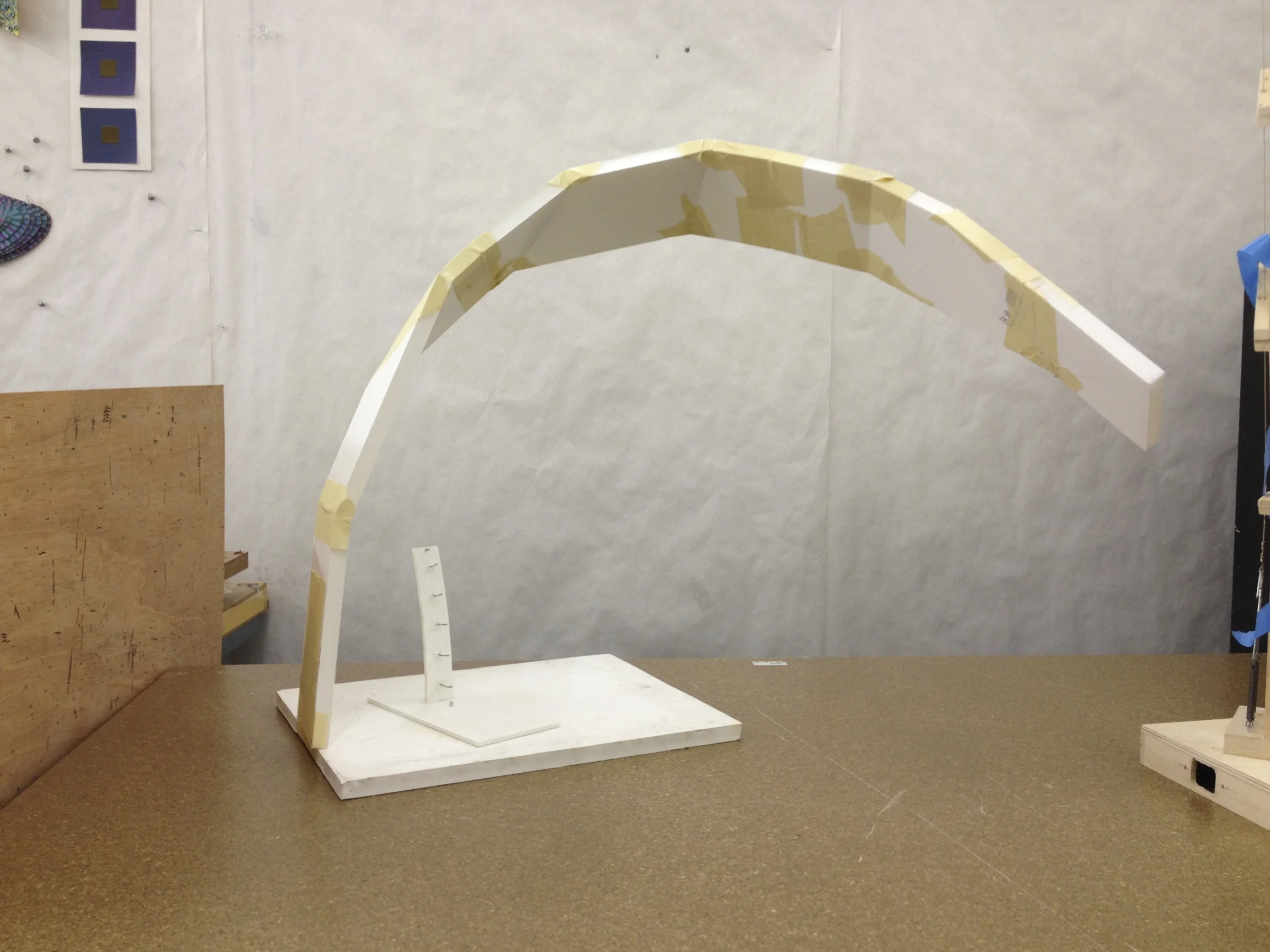
Controlled Sketch Model - The Bow
Affixing one end of the model to a base, restraining one side with elastic cord and attaching a pulling string on the other produced a movement that reminded me of a finger bending but in a different scale could be a very polite person bowing. This was a very pleasing movement.
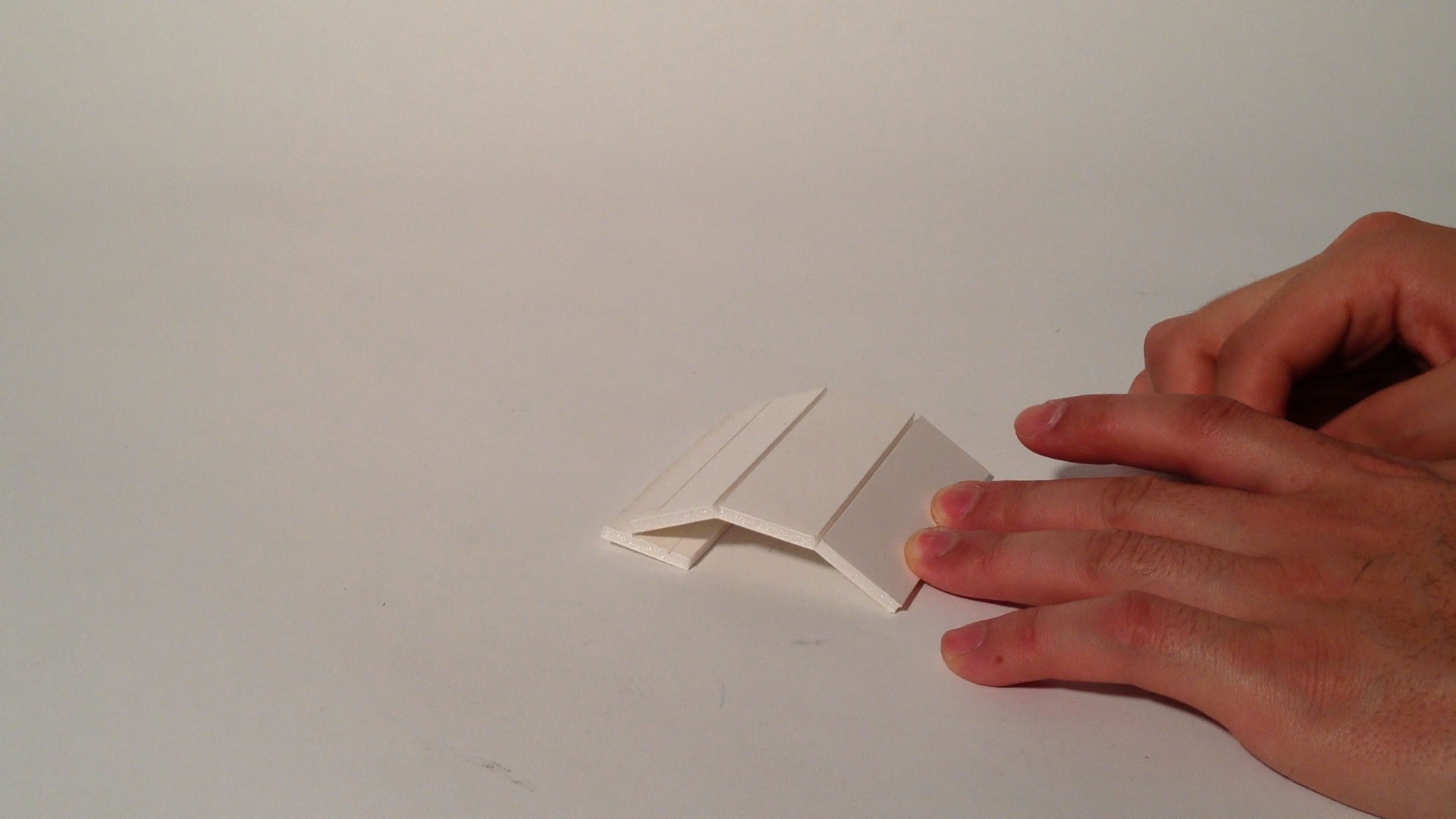
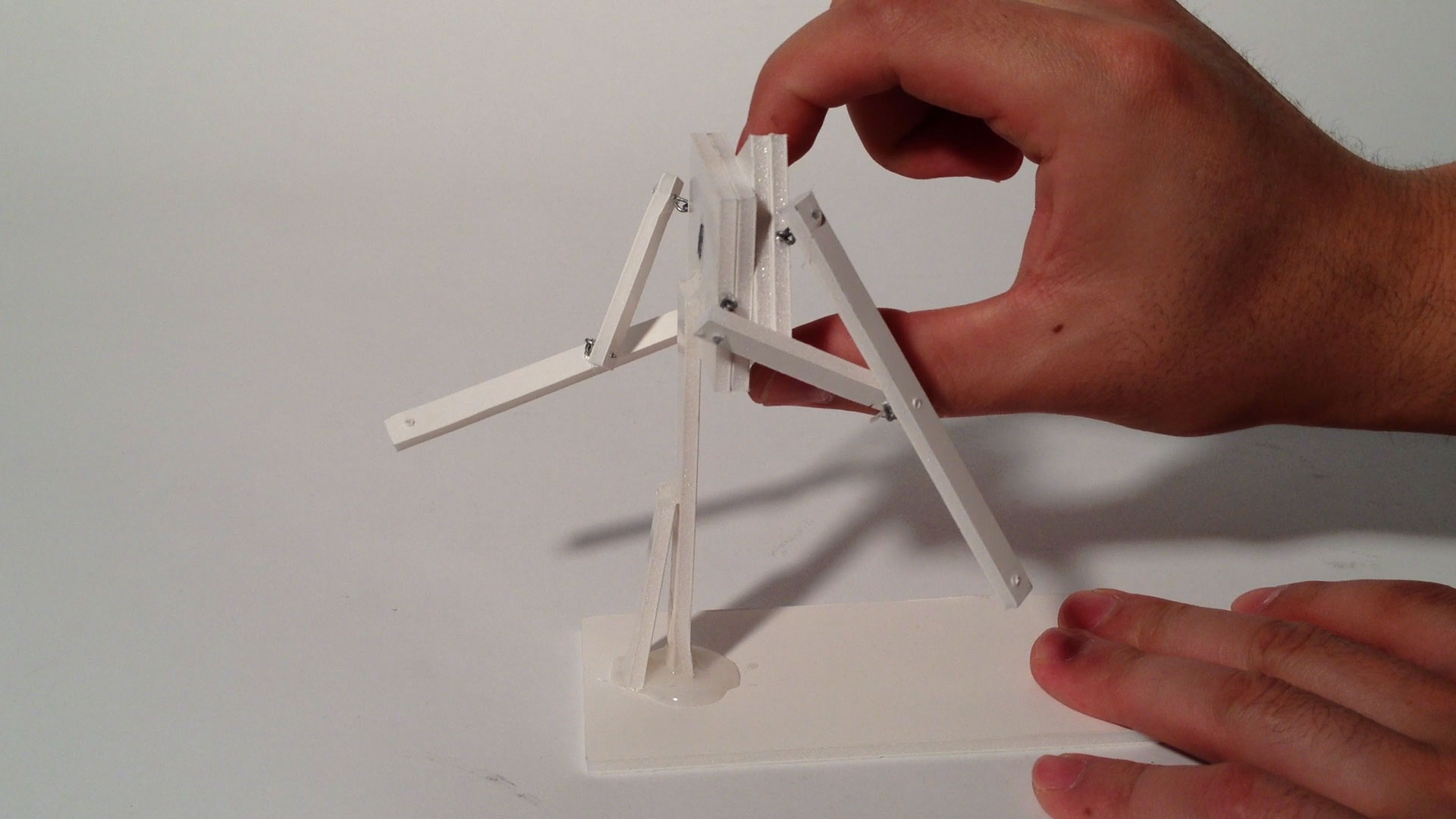
Triangle Shaped Model
Slightly larger, shaped like a triangle where each segment had individual elastic cord attached to the base. Since the piece with the least resistance would bend first, the movement started from the top.
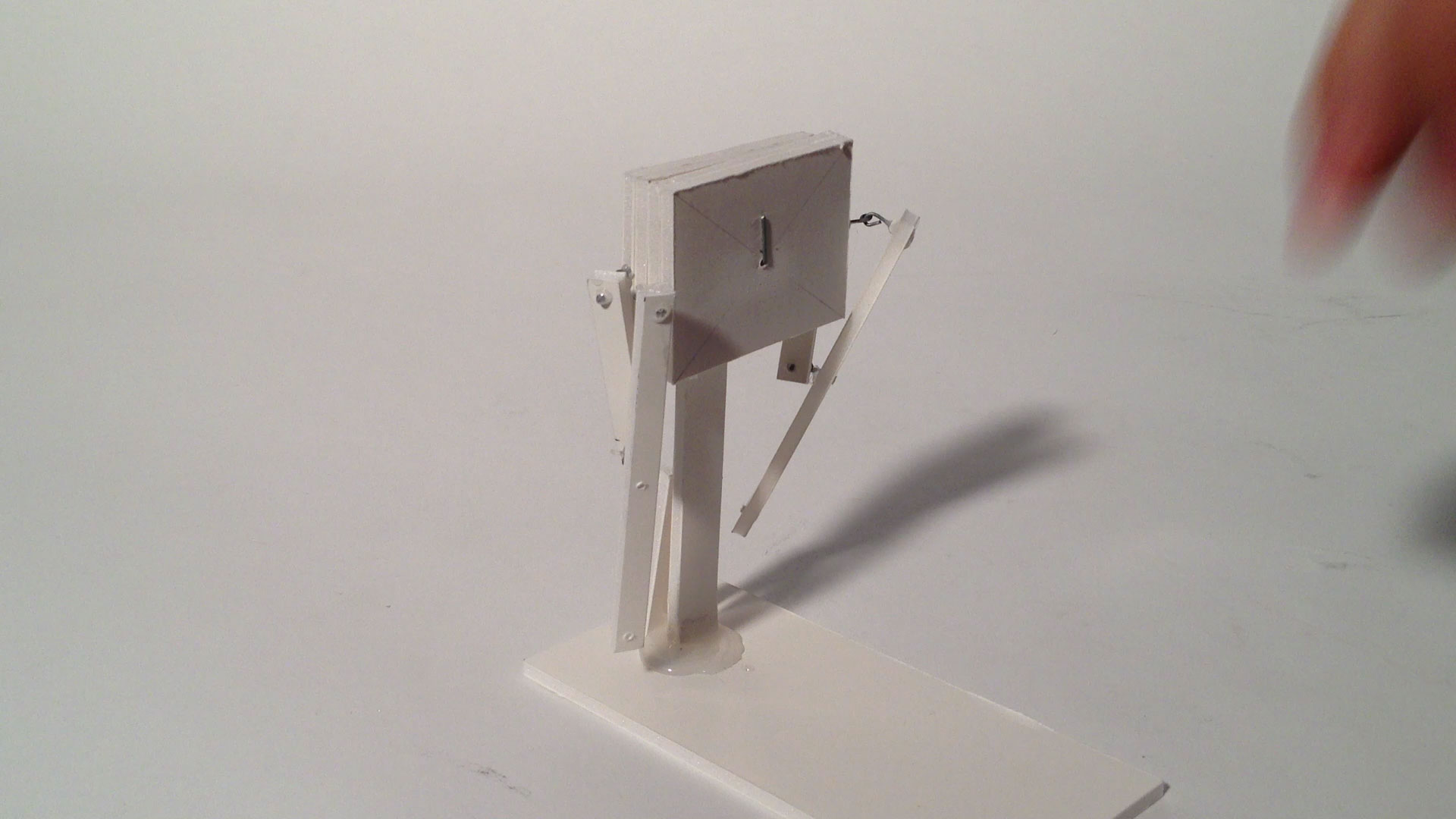
Sail Shaped Model
This model features one continuous pull string running down the front side and up the back. This produced a jerky movement as the string had much more friction to overcome.

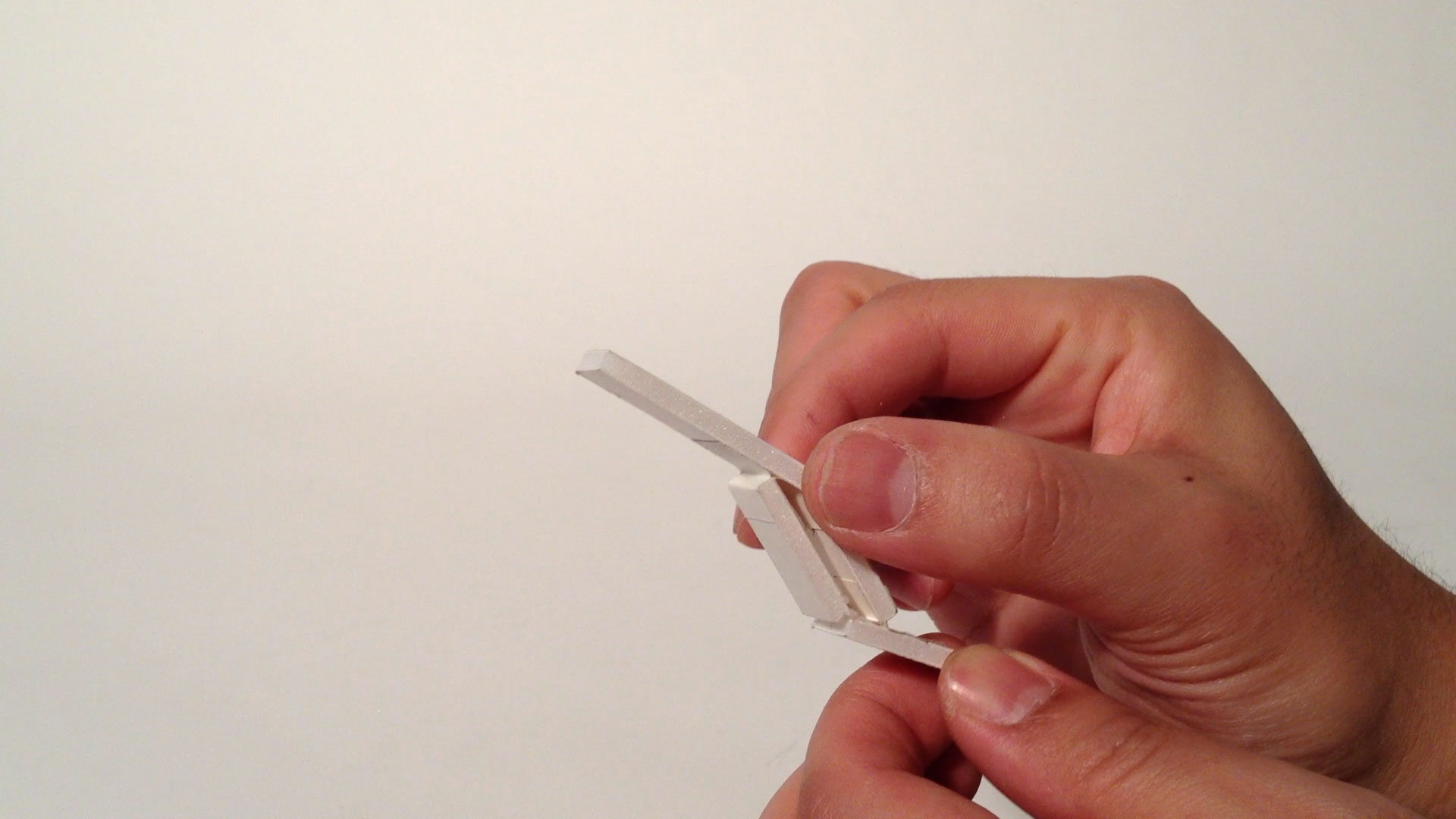
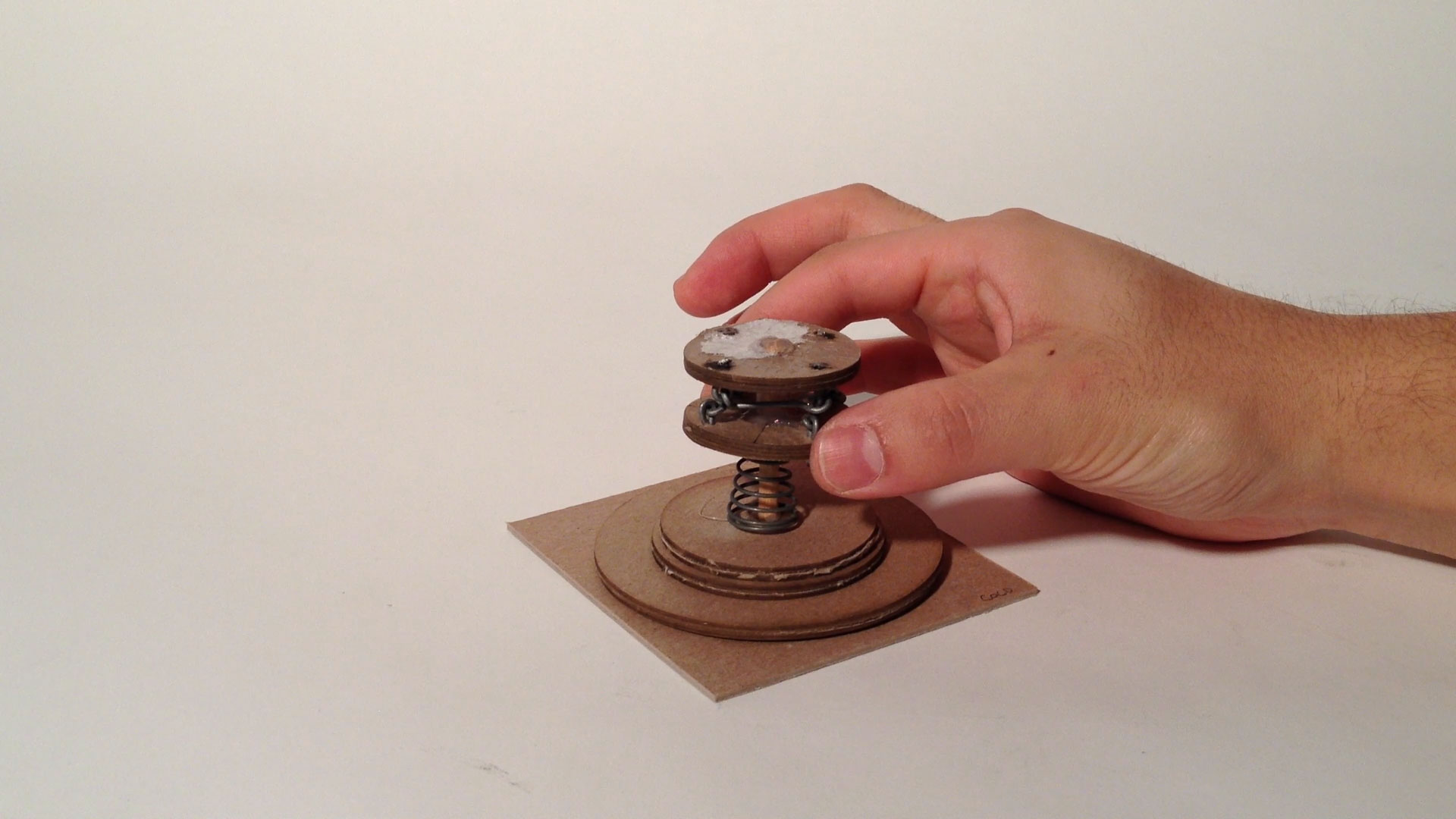
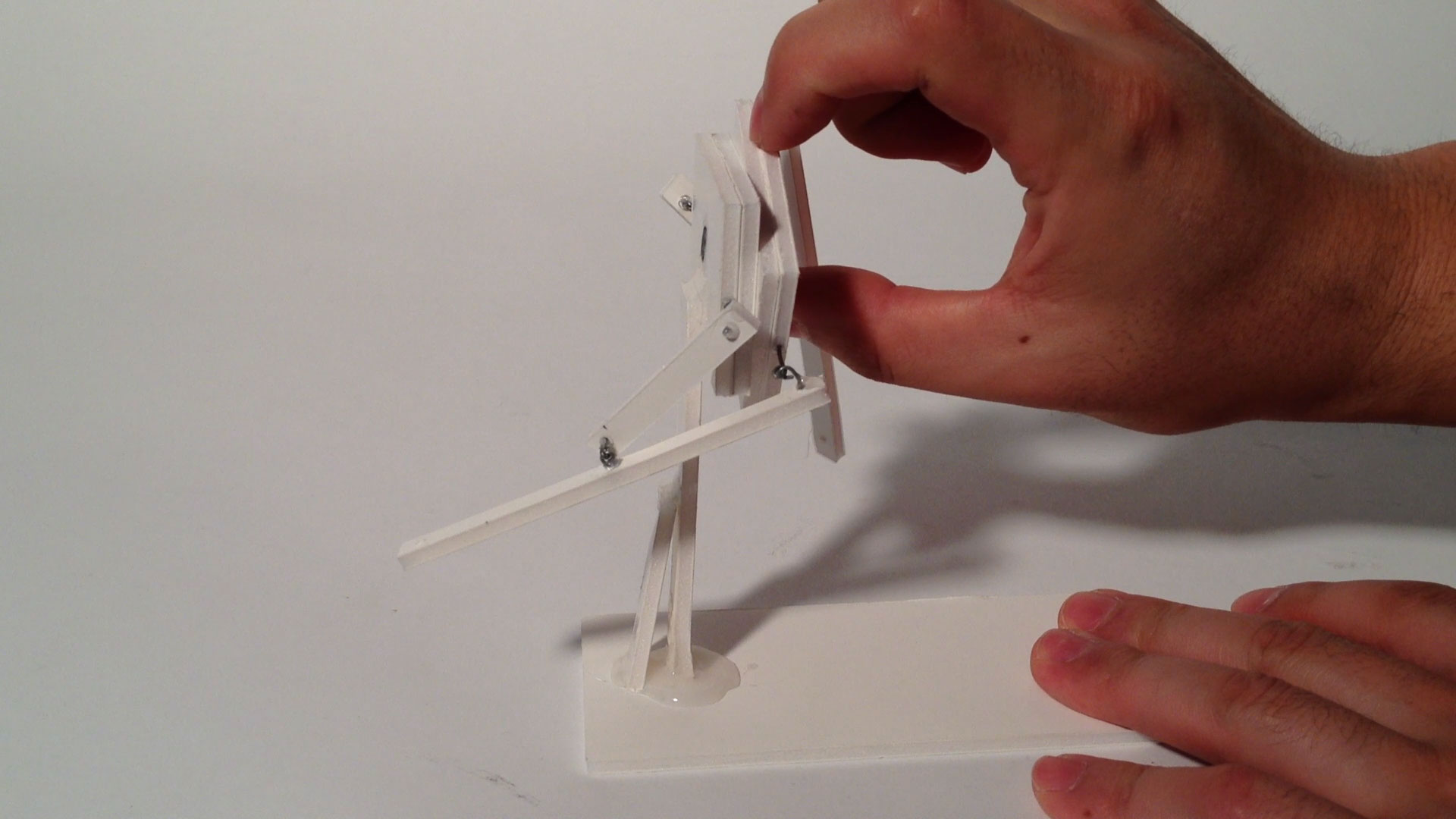
Trying out different angles
Actual Scale Static Model
The final prototype was made with basswood, steel wire, springs and a LED kit from SparkFun electronics. The LEDs were prone to overheating so I devised a heat sink with a sheet of brass, as seen on the far right.
Unfortunately the full scale prototype did not move like I had intended. The change in material to wood along with the added weight of the LED kit changed the overall dynamics of mechanism that is responsible for the movement. This brought me to a new level of appreciation for those scientists who are trying to build robots that can move like humans.

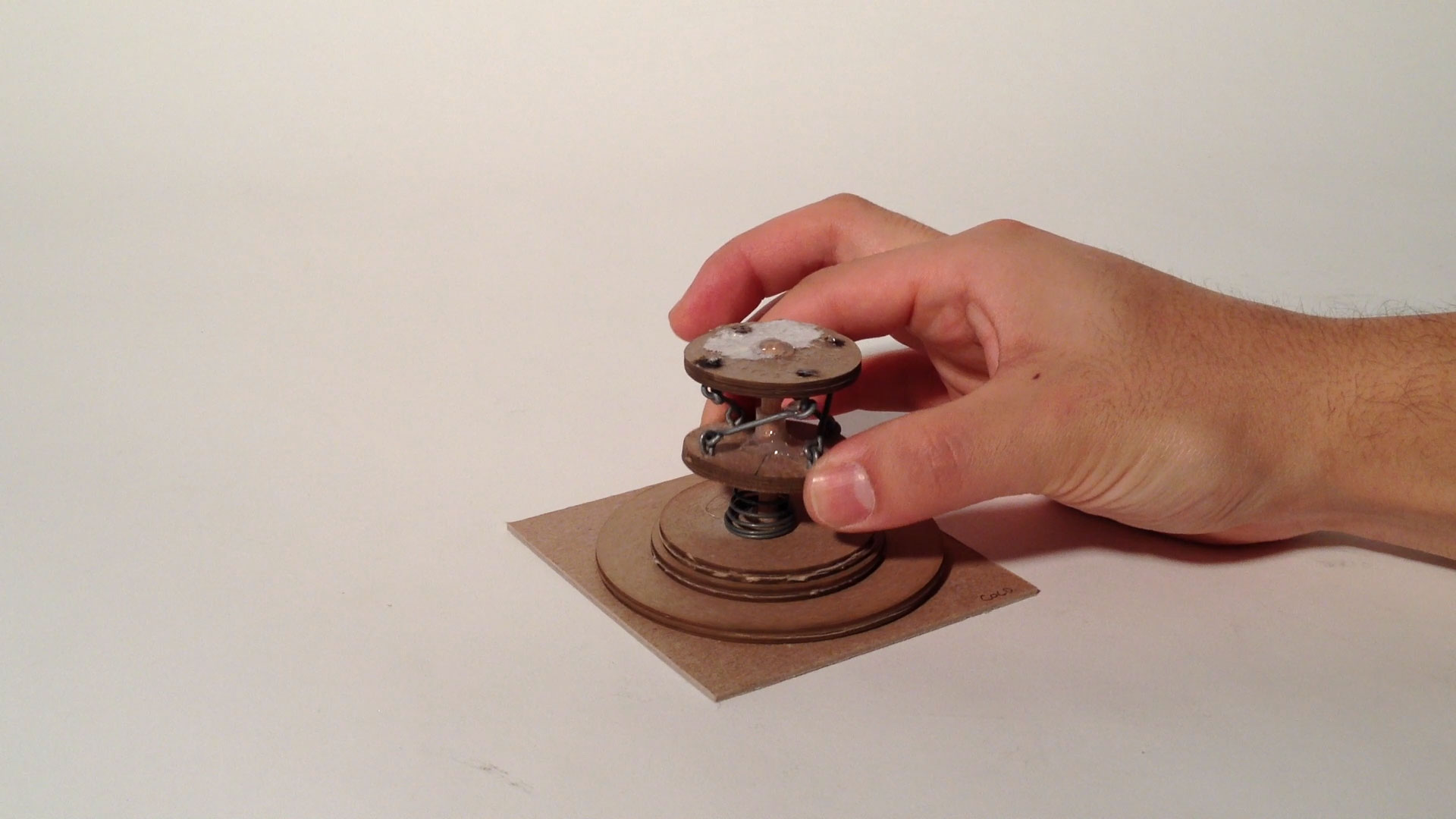
Final Model

This is why it is the King Giraffe Lamp. A heat sink for the LEDs made from a sheet of brass and some brass rods.